A scene from NASA Robotics Mining Competition 2015. Image credit: Meredith Chandler, NASA. You can see more of Meredith’s excellent photographs here: https://plus.google.com/collection/QN3Mb
We just completed the 6th annual NASA Robotics Mining Competition, and like always it was awesome! This year, 46 universities from around the United States brought robots to mine the simulated Martian soil and win the coveted Joe Kosmo Award. Every year it has been an amazing success. We have learned valuable lessons that will make it possible for humans to go to Mars safely and affordably.
Why Mine on Mars?

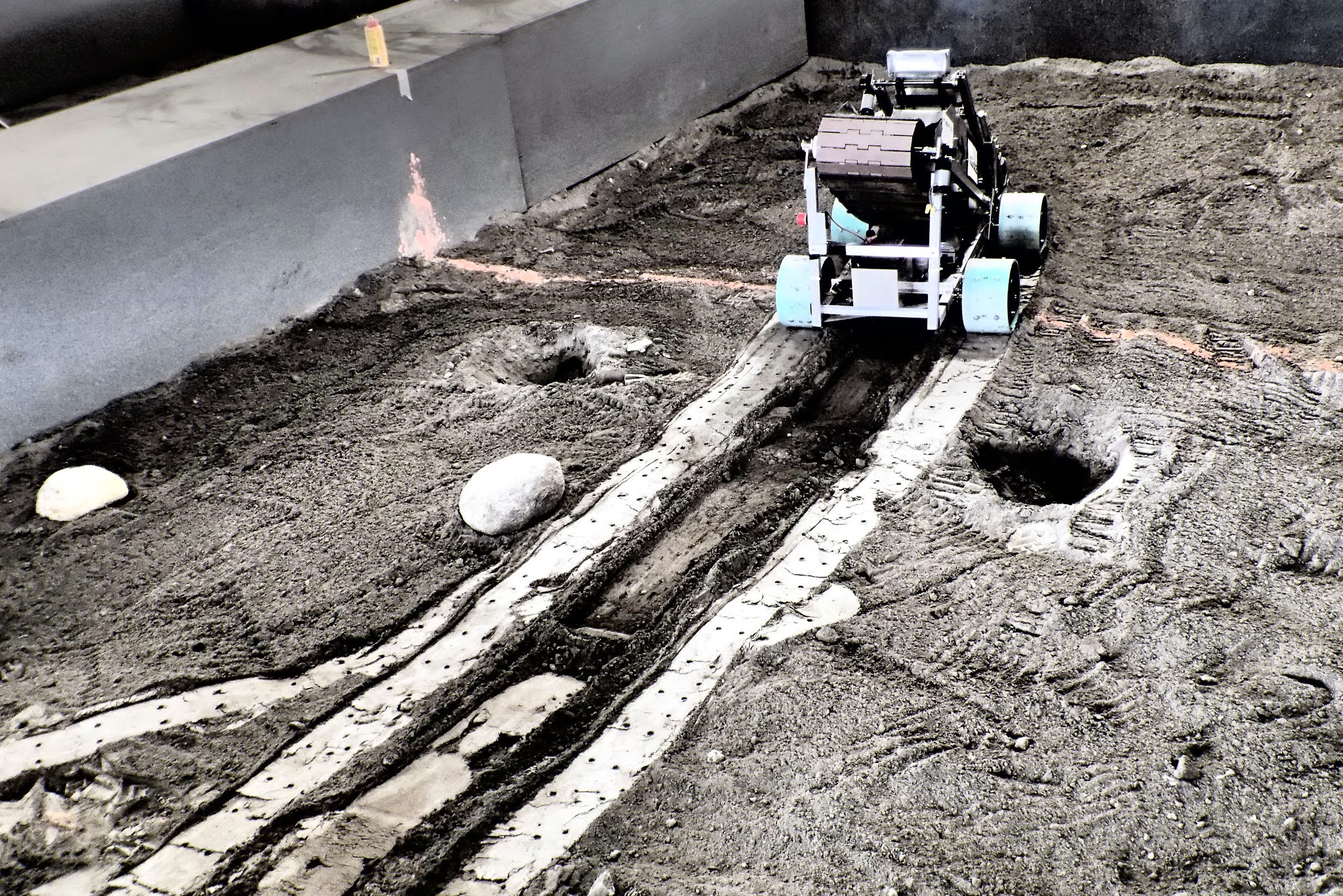
A Mars mining robot by the University of Illinois at Urbana-Champaign. Image credit: Meredith Chandler, NASA
Studies have shown we can dramatically cut the cost of human missions to Mars if we use local resources: the water ice beneath the Martian soil and the carbon dioxide in its atmosphere. With these we can create methane and oxygen for rocket propellants, and we can provide air and water for the crew. Water ice is easier to excavate at the Martian poles where it lies right on the surface. At lower latitudes it is buried beneath the soil that shades it from the sun. For affordable human missions to Mars, we need mining robots that can dig up the ice and haul it to chemical processors.
Mars mining will be difficult for several reasons: small digging force, abrasive dust, getting stuck, long communications delay, and nobody to fix them.
Mini-Me Mining

A Mars mining robot by Kent State University. Image credit: Meredith Chandler, NASA
Why would these robots have only a small digging force? Because we can’t afford to build super enormous rockets capable of launching giant mining trucks to Mars. We have to send mini-mining trucks, instead. When they get to Mars, the gravity there is much less than it is on Earth. With both low mass and low gravity they will have a very low weight, which means they have very low traction on the ground beneath their wheels or treads, so they won’t have much force to push a digging bucket into soil or ice. We need innovative digging systems that can work with very low force! In the next post I will show some of these innovative designs that students have built for the NASA Robotics Mining Competition.
Nonplussed by the Dust

Some dust raised by the West Virginia robot in the 2012 competition. Image credit: Phil Metzger, NASA
And what’s so bad about the Martian dust? Because it is very abrasive and gets into everything, and eventually it will jam up the mechanisms of mining robots and make them stop functioning. How long do they need to keep functioning? Studies have shown that there is so much digging to do that it will take them more than a year to get it finished. Fortunately, they will have enough time. We send missions to Mars only once every two years when the planets line up, and then it takes 6 months of travel time to make the journey. That leaves 18 months for robotic mining before we send the humans. We want to know all the fuel is successfully made before the humans are committed onto the interplanetary trajectory. It’s good we have that much time, because the robots are small and won’t be nearly as fast as the giant mining trucks on Earth. If only they can keep mining in the harsh martian dust for 18 months! We need to develop innovative methods for keeping dust out. At the NASA Robotics Mining Competition, robots are awarded points if their mechanisms are enclosed to keep out the dust, if they use brushes or other devices to remove dust, and if they avoid throwing dust on themselves while operating.
Little Wheel Keep On Turning

The heartbreak of getting stuck. As far as I can tell, no robot is immune. This is the North Dakota robot in the 2014 competition. Image credit: Phil Metzger, NASA
Getting stuck in the regolith is a constant threat. Regolith, like all granular materials, is a complex fluid that can transition from solid-like to fluid-like behaviors, and the scientists and engineers who study it (like I do) have not gotten the physics all figured out yet. I’ve even heard eminent colleagues laugh at the idea that we could get it figured out within the next 50 years! It’s amazing that such a common material has evaded an explanation for so long. The French scientist Charles-Augustin de Coulomb did the first soil mechanics experiment way back in 1776. We have lots of experience working with regolith here on Earth so we have learned how to design wheels pretty well, but not so much for small robots in low-gravity worlds like Mars, nor with fluffy extraterrestrial soil that cannot simply be taken into a geotechnical lab and measured.
Nevertheless, we must do our best. Whenever the wheels push regolith in the wrong way, it switches to its fluid-like behavior and flows around the wheels freely, providing no traction for the robots to move. In other words, the robots get stuck. In the NASA Robotics Mining Competition, getting stuck is an all-too-common, heart-breaking occurrence. Of the robots that don’t suffer communications or computer failures, about half get stuck. By studying them over the years, we have learned a lot of tricks to design better robots. Unfortunately, the competition is still at Earth’s gravity, but at least we are using realistic regolith and small robots so much of the physics is relevant. Eventually, we will take our mining robots into reduced gravity aircraft for their final tests.
Robots on a Long Leash
The communications time delay between Earth and Mars can be large, as much as 21 minutes one-way. The means, if the operators on Earth see from the robot’s cameras that it is driving toward a cliff, their “STOP” command will get back to the robot over 40 minutes too late. Obviously, we can’t operate Mars mining robots using joystick commands from Earth. We need autonomous mining.
Now one idea is to put humans on Mars’ lower moon, Phobos, and let them teleoperate the robots that are down on the Martian surface using joystick commands. Communication satellites around Mars will relay the control signals from Phobos (as it quickly circles the globe) to the future landing site on the surface. The time delay will be no more than a second or two. I think that is a grand idea! NASA wants to send humans to Mars by the 2030’s, and it’s likely (considering the budget shortfalls and the amount of other things we have to develop before then) that we won’t have fully autonomous mining ready in time. By doing the mining from Phobos, the surface missions can proceed on time. And while they are mining from Phobos, we will be learning more about how the robots function in the Martian regolith and gravity, so that our automation software can be perfected. Then, additional missions to Mars won’t need missions to Phobos each time.
Robots Helping Robots
The robots on the surface of Mars will need to do all this without breaking down for about a year and a half. If they do break down, there won’t be a robot repair shop to fix them. They need to be very reliable designs.
One solution is to send a swarm of small robots, so even if a few break down then there will be more to complete the task. This year at the NASA Robotics Mining Competition, five different teams brought multiple-robot systems. Every one of these was a completely different concept. This is why we have this competition. It brings in the vast creativity of college students and gives them the freedom to take risks and try new things.
Another strategy is to put a robotic repair shop on Mars. Many minerals contain metals that can be extracted and refined. This metal could be used by a 3D printer to make spare parts, and a robot with some dexterity could replace parts to fix a broken robot. We probably won’t build a robotic robot repair shop for the earliest Mars missions, but it is the eventual goal.
Next Steps
So what is the next step for Mars mining? Every year, the head judge of the competition, Rob Mueller, has been evolving the rules to push it towards more realism. In the first years of the competition there were no rules about dust, for example. Just this year, simulated ice was added to the regolith beneath 20 cm of dry soil, and teams that dug down into the ice got extra points. I think the competition will continue to evolve as we get closer to building the actual mining robots for Mars. Eventually, the in-house NASA team will build some flight-like prototypes and put them through final tests. Then, it’s off to Mars.